
Tenía pendiente publicar el proyecto que presenté a la Maker Faire Madrid 2016 en la mesa de Spainlabs.
Consiste en que el usuario elija mediante un botón qué color de caramelo quiere recibir, entonces el sistema empezará a remover los M&M’s de un embudo para que caiga uno solo en una plataforma, después el sistema reconocerá el color del caramelo y si es el elegido caerá en un recipiente y sino en otro recipiente repitiendo la operación:
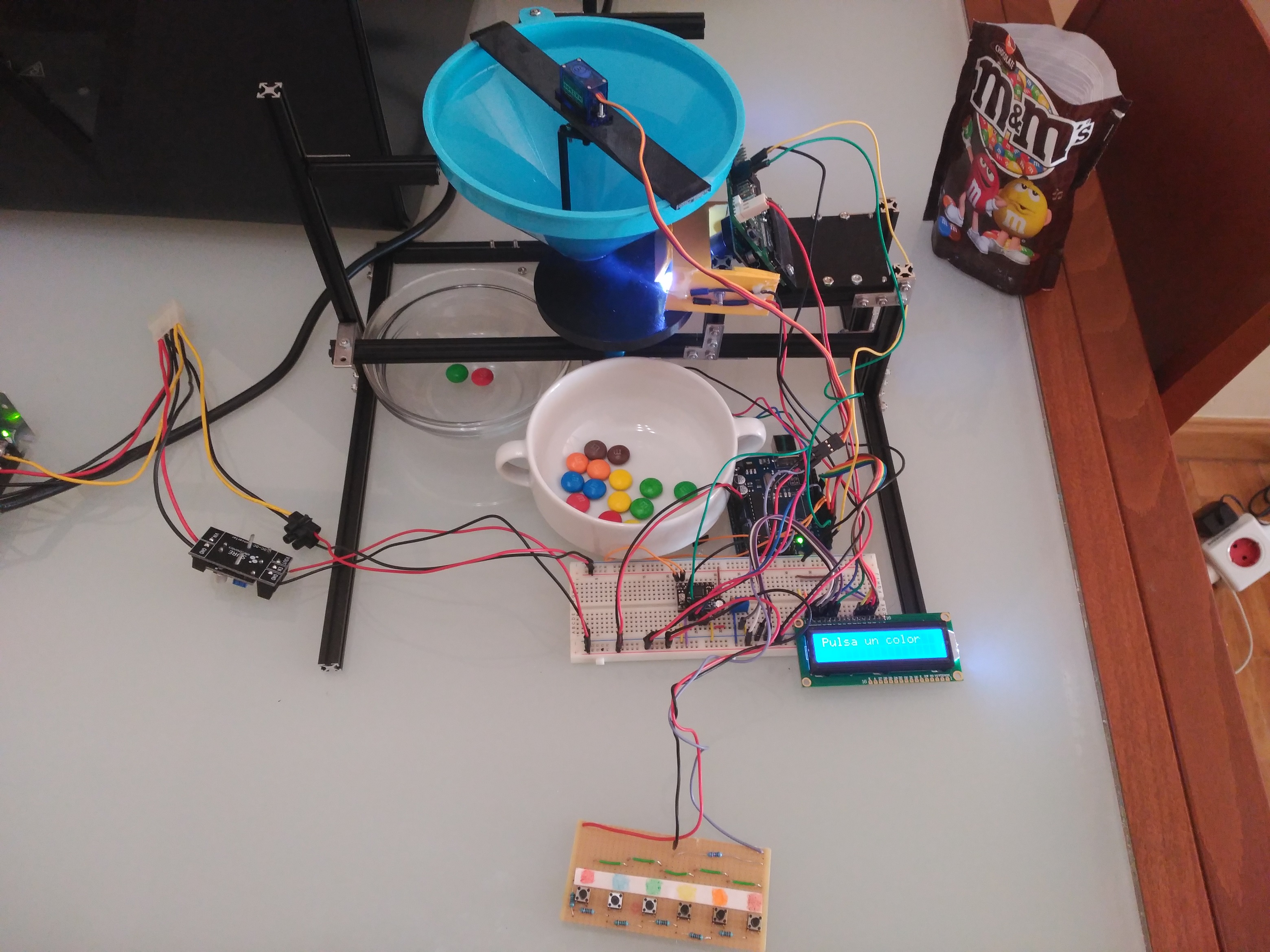
Así es como se ve el conjunto:
Este es el esquema del sistema:
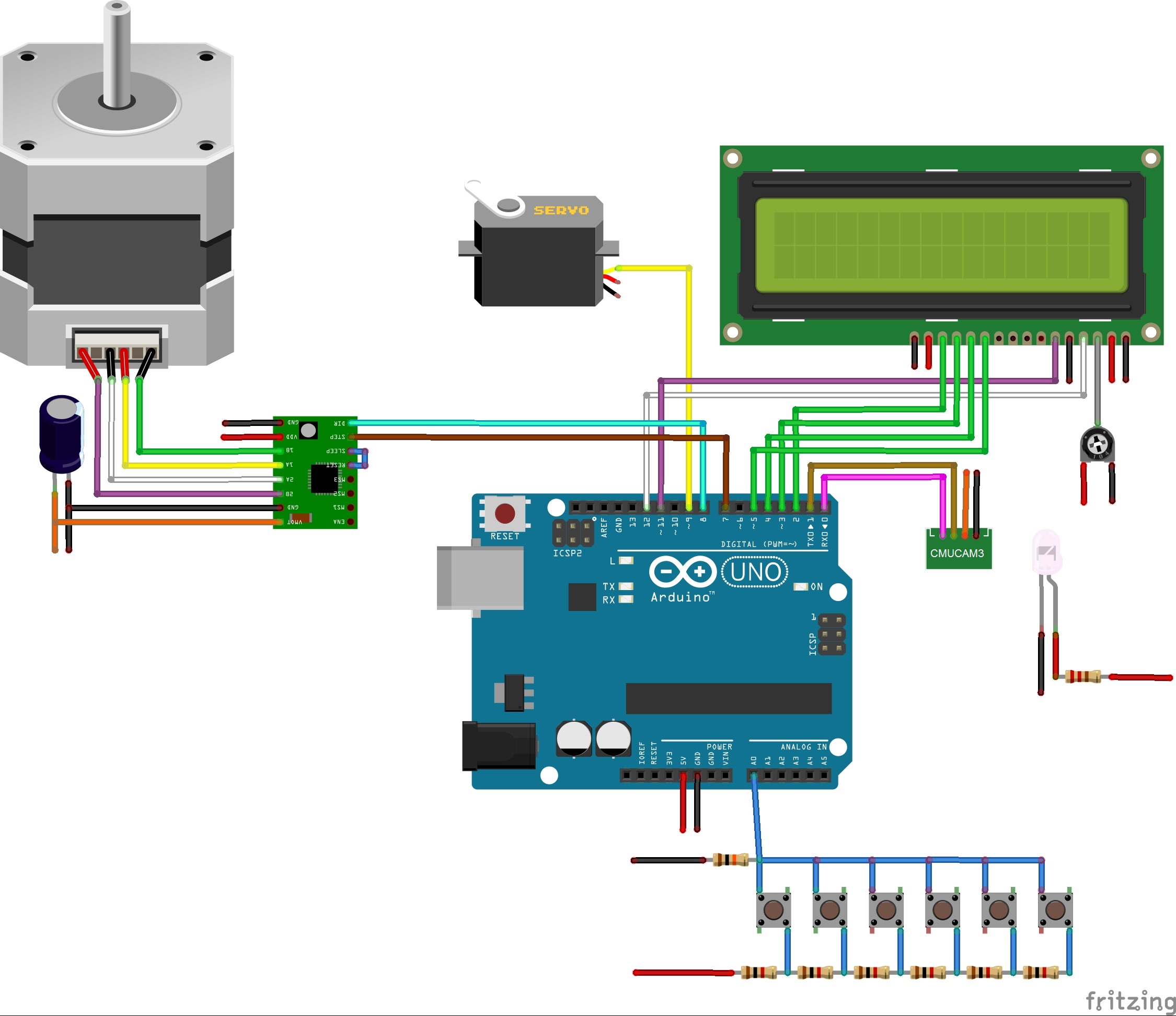
El sistema está formado por un Arduino UNO, un motor paso a paso NEMA 17 con un driver pololu A4988 y un condensador electrolítico de 100µf, un servo sg90, una cmucam 3, un led blanco con una resistencia de 220Ω, un display HD44780 con un potenciómetro de 10KΩ y 6 botones con 6 resistencias de 1KΩ y 1 resistencia de 10KΩ. En el esquema los cable sueltos tienen el siguiente significado: los de color negro van a masa, los de color rojo a 5V y los de color naranja a 12V.
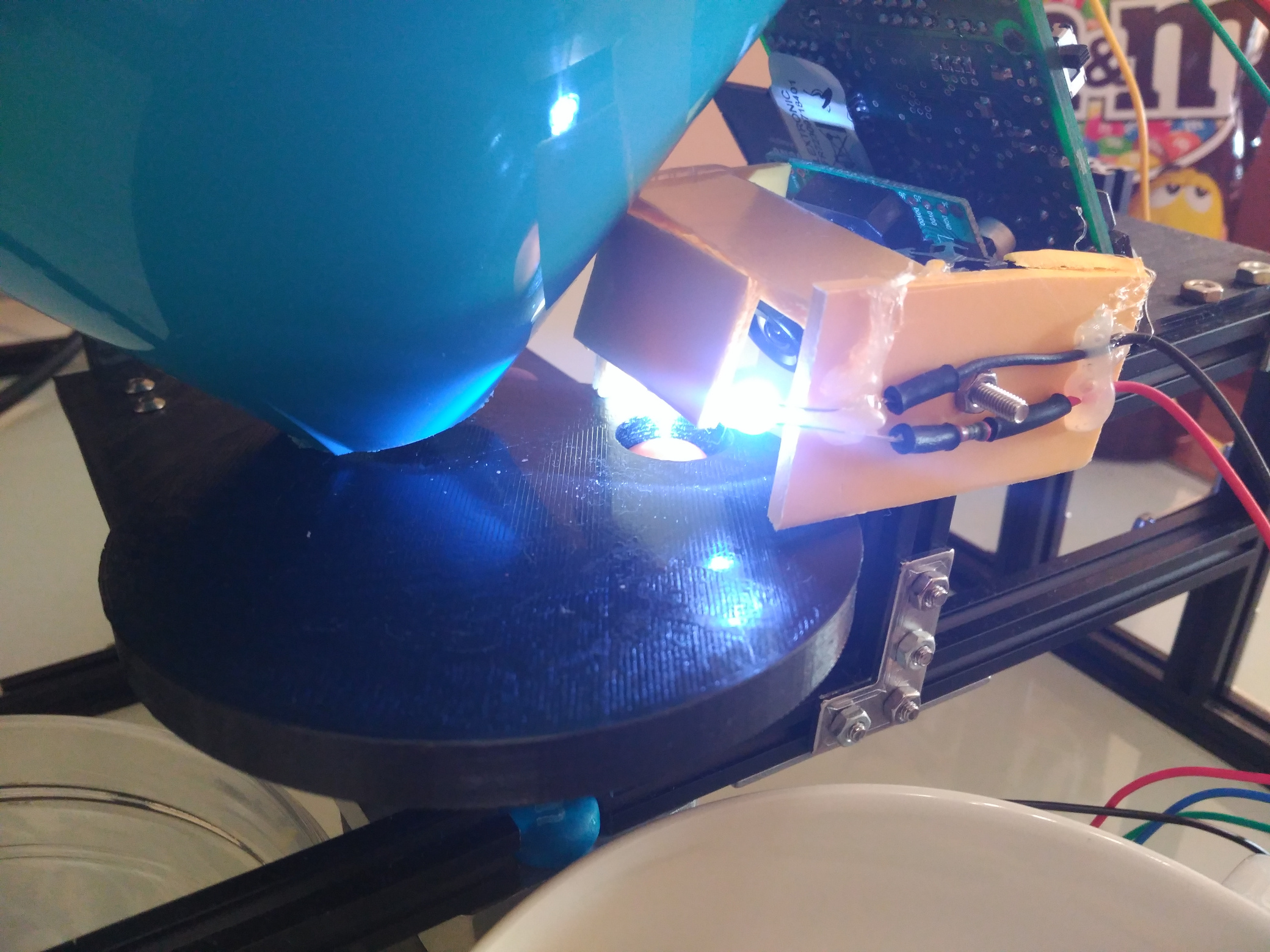
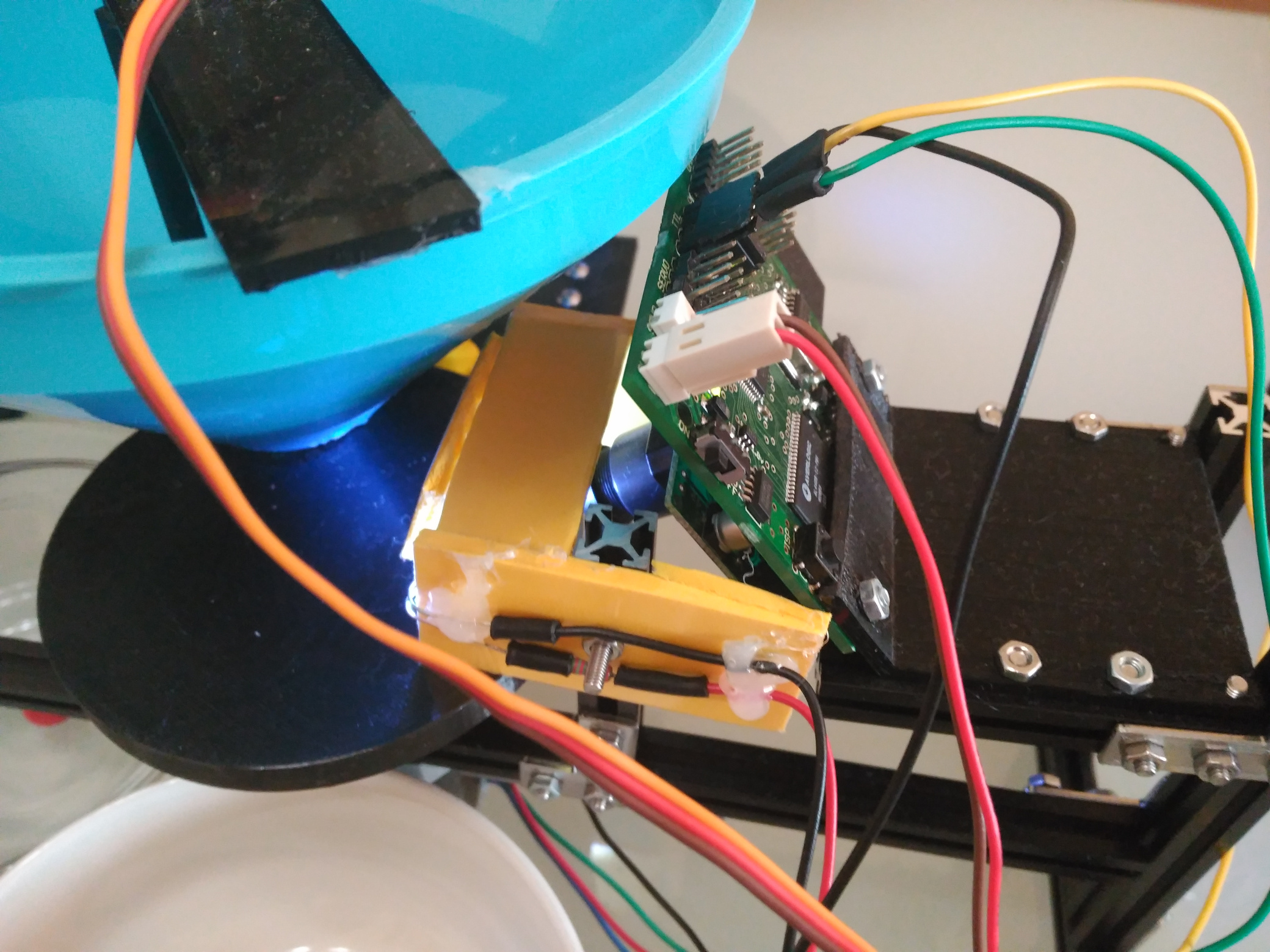
La cmucam 3 tiene instalado el fimrware que emula la cmucam 2. Está dentro de una «caja» de forex y contiene un led para que las condiciones de iluminación siempre sean las mismas.
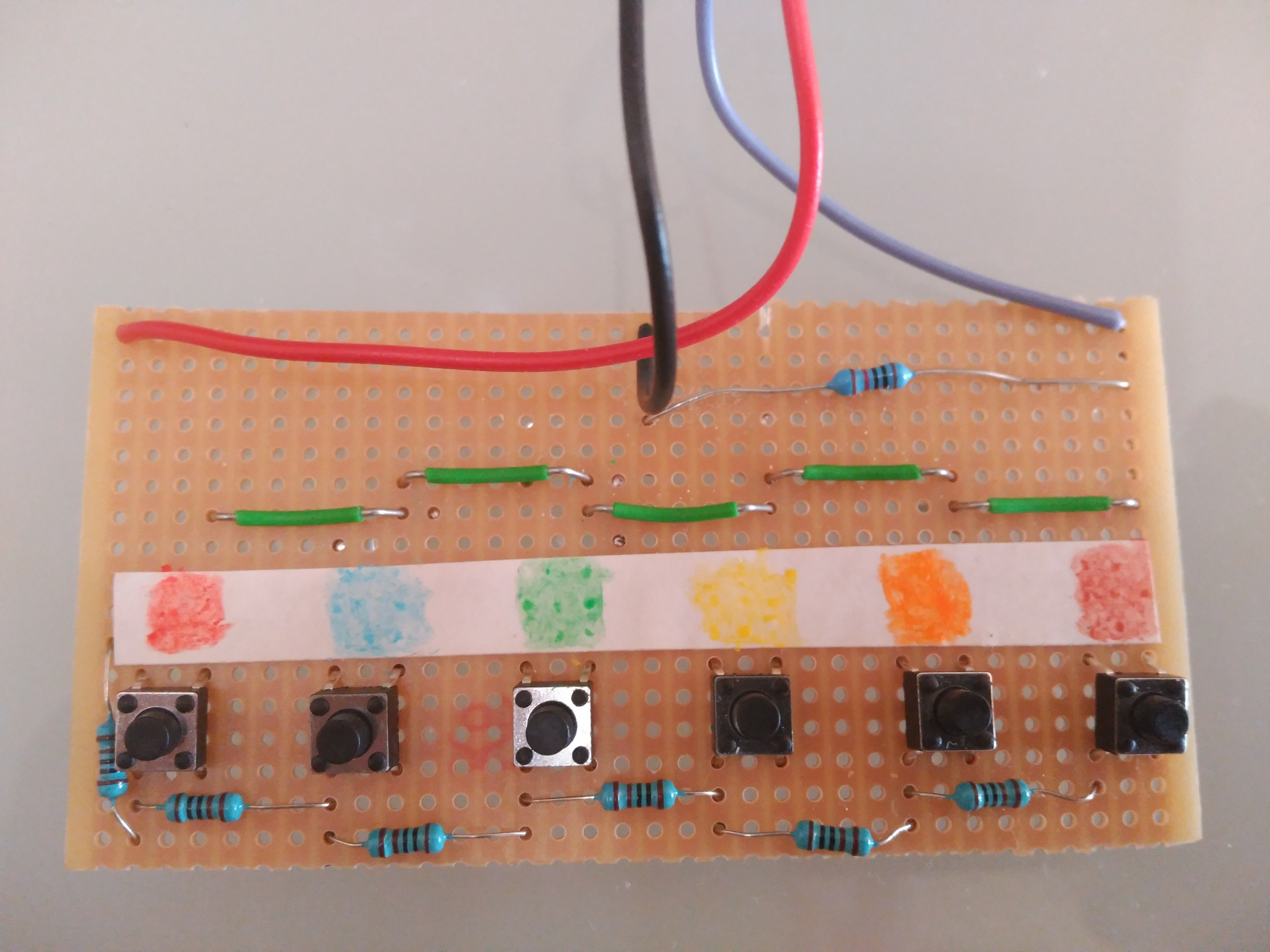
Los botones están configurados de tal forma que al pulsar cada uno de ellos el voltaje cambia y puede ser medido por un sólo pin analógico de arduino.
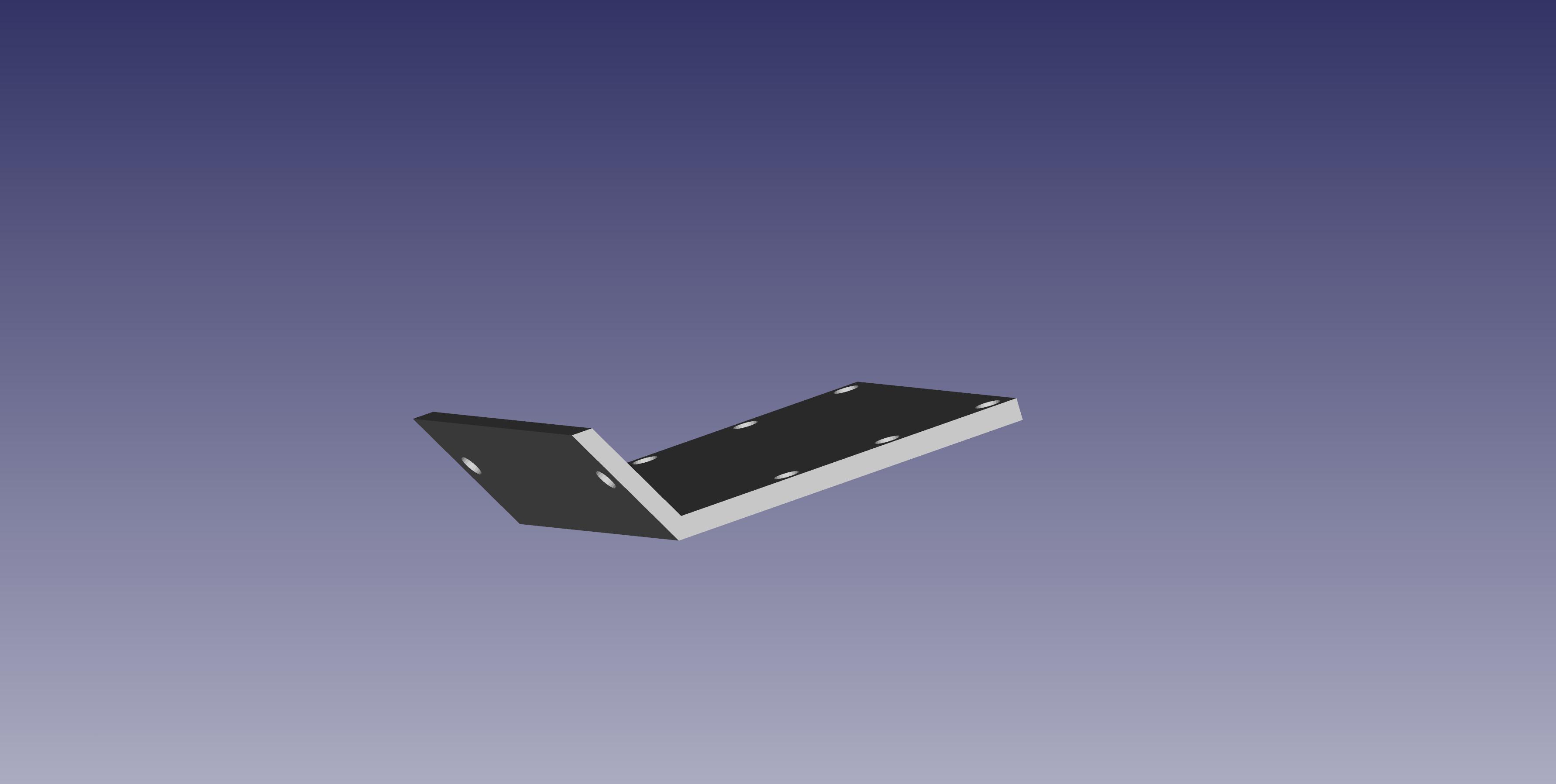
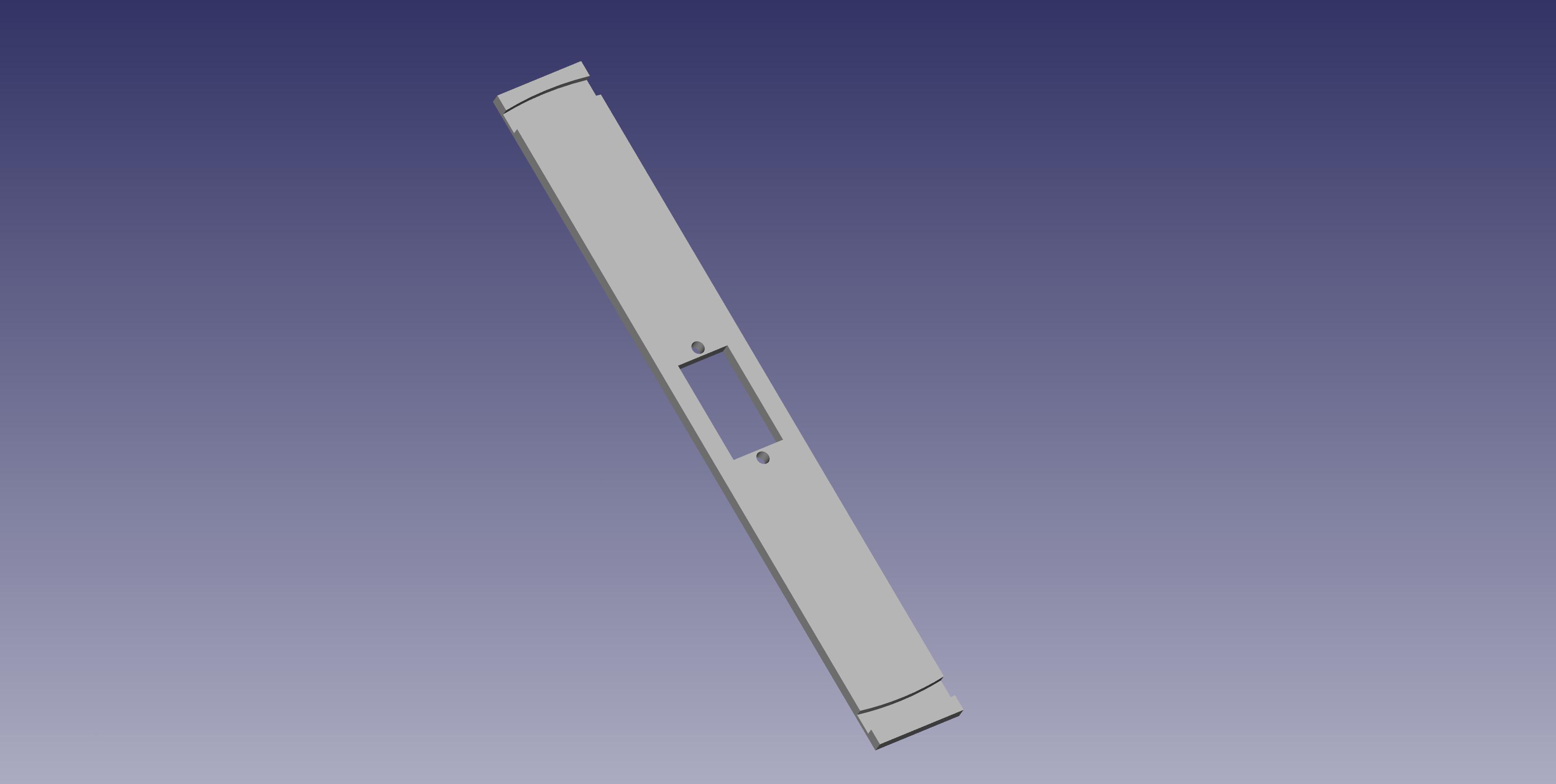
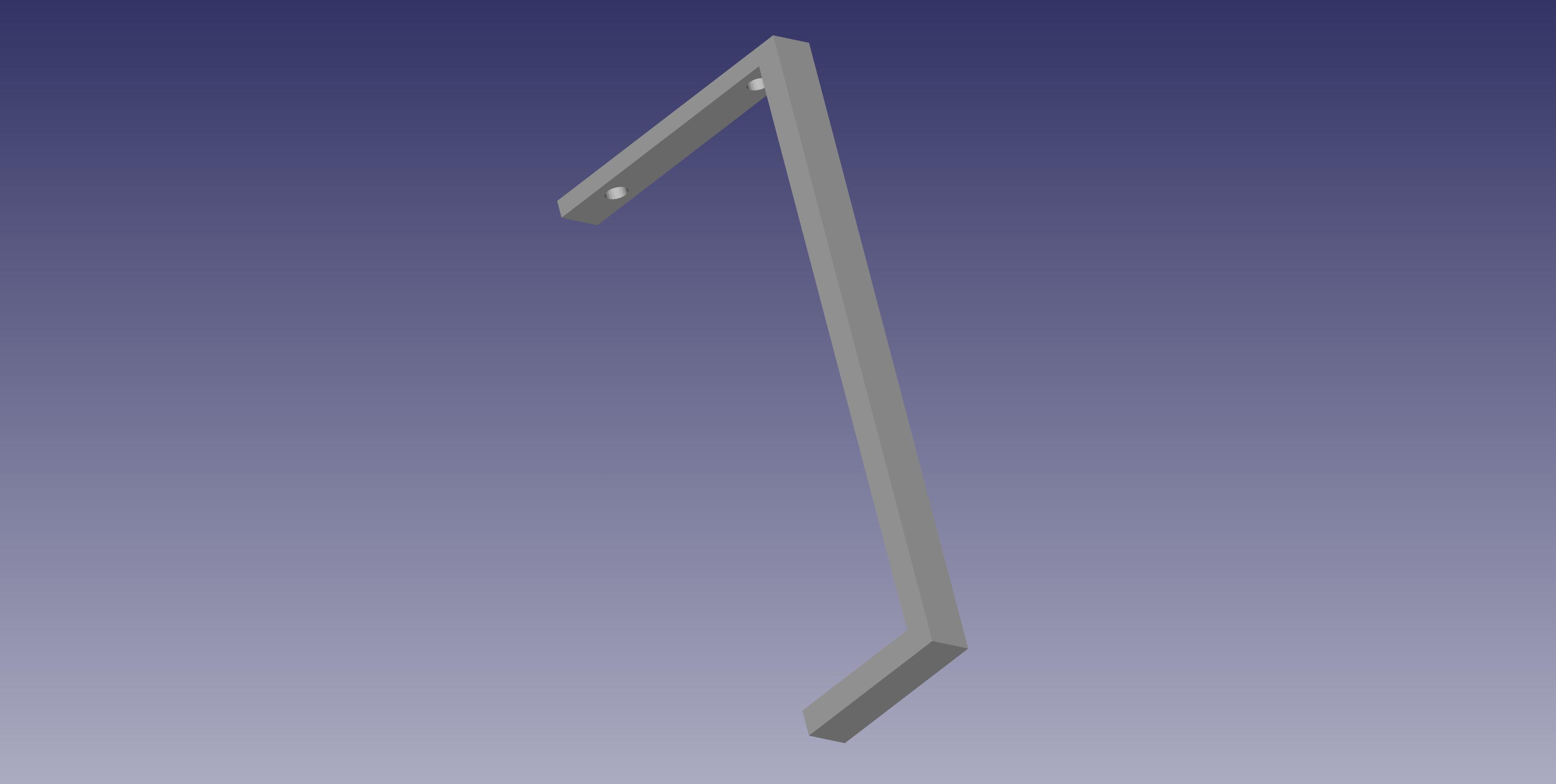
Para el proyecto he tenido que diseñar e imprimir varias piezas en 3d:
Soporte de la cmucam 3 de 135°
Fijación del servo al embudo
Brazo removedor para el servo
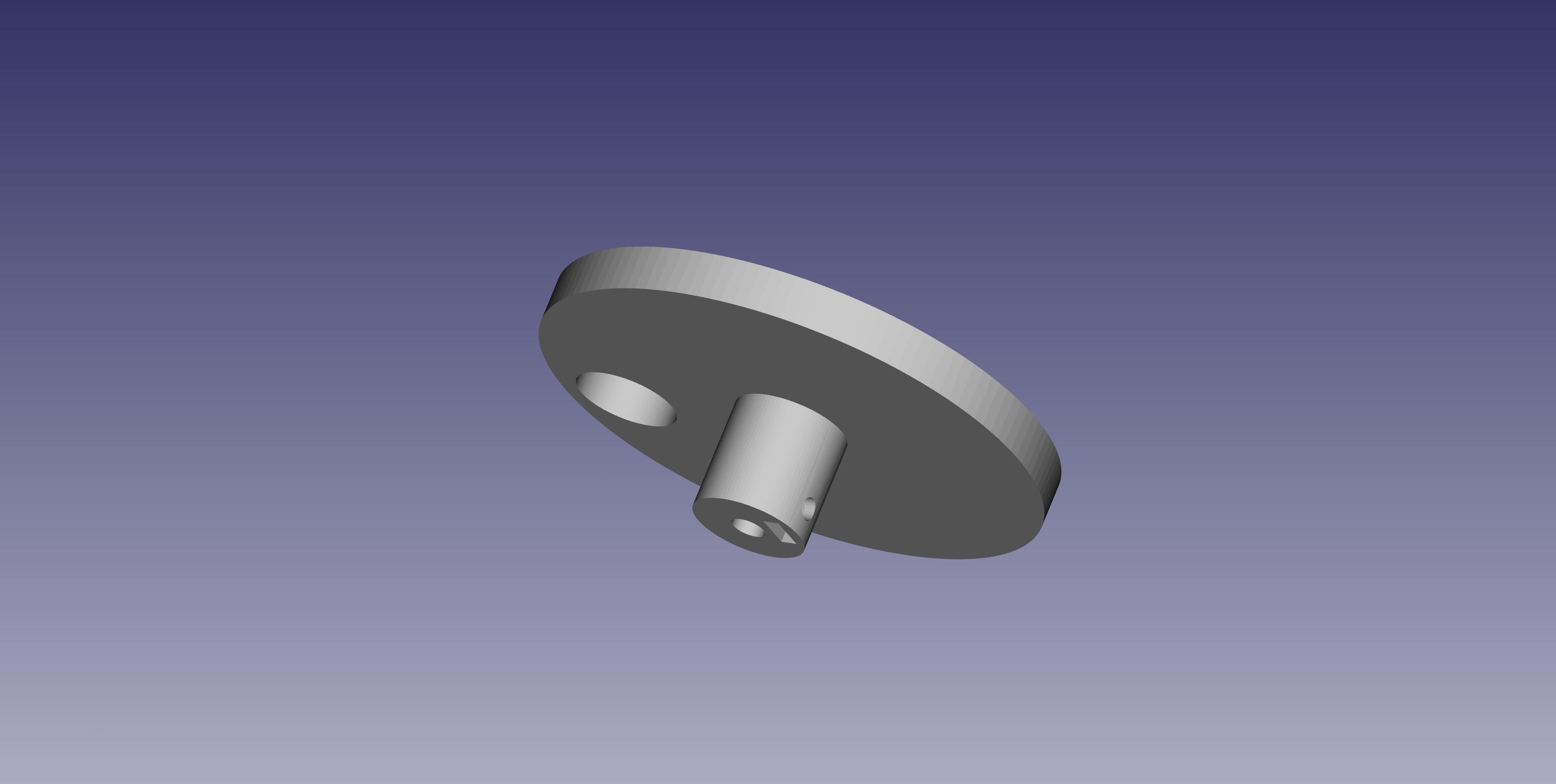
Plato giratorio para recolectar un caramelo con ranuras para sujetarlo al eje del motor paso a paso con tornillo y tuerca
Plataforma para mantener el caramelo en el recorrido giratorio hasta que caiga en un recipiente
La mayoría de la estructura de soporte está basada en MakerBeam.
El embudo es uno normal, pero serrado para que un caramelo en horizontal pueda entrar sin problemas.

El código fuente del programa para arduino es el siguiente:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 |
#include <LiquidCrystal.h> #include <Servo.h> Servo servo1; LiquidCrystal lcd(12, 11, 5, 4, 3, 2); int colores[][3][2] = {{{0, 0}, {0, 0}, {0, 0}}, {{0, 0}, {0, 0}, {0, 0}}, {{0, 0}, {0, 0}, {0, 0}}, {{0, 0}, {0, 0}, {0, 0}}, {{0, 0}, {0, 0}, {0, 0}}, {{0, 0}, {0, 0}, {0, 0}}, {{0, 0}, {0, 0}, {0, 0}}}; String nombres[] = {"ROJO", "AZUL", "VERDE", "AMARILLO", "NARANJA", "MARRON", "VACIO", "INDETERMINADO"}; int medida[] = {0, 0, 0}; int max_min [][2] = {{0,0}, {0,0}, {0,0}}; int botones[][2] = {{0, 1023}, {0, 1023}, {0, 1023}, {0, 1023}, {0, 1023}, {0, 1023}}; // Gira el motor paso a paso un número de pasos en el sentido indicado void gira_plato(int pasos, int sentido) { int indice; digitalWrite(8, sentido); for(indice = 0; indice < pasos; indice++) { digitalWrite(7, HIGH); delay(2); digitalWrite(7, LOW); delay(2); } } // Gira el servo que remueve los caramelos void desatasca_embudo() { int indice; for(indice = 0; indice < 4; indice++) { servo1.write(10); delay(500); servo1.write(180); delay(500); } } // Devuelve un campo de una cadena delimitada por separadores String getValue(String data, char separator, int index) { int found = 0; int strIndex[] = {0, -1}; int maxIndex = data.length() - 1; for(int i=0; i<= maxIndex && found <= index; i++) { if(data.charAt(i)==separator || i==maxIndex) { found++; strIndex[0] = strIndex[1]+1; strIndex[1] = (i == maxIndex) ? i+1 : i; } } return found>index ? data.substring(strIndex[0], strIndex[1]) : ""; } // Detecta el color que está visualizando la cmucam void detecta_color(boolean calibra) { int indice; int indice2; String cadena; String numero; int numeros[] = {0, 0, 0}; Serial.print("GM\r"); for(indice = 0; indice < 3; indice++) { max_min[indice][0] = 0; max_min[indice][1] = 255; } indice = 0; while(indice < 100) { cadena = Serial.readStringUntil('\r'); if(cadena.startsWith("S ")) { numero = getValue(cadena, ' ', 1); numeros[0] = numero.toInt(); numero = getValue(cadena, ' ', 2); numeros[1] = numero.toInt(); numero = getValue(cadena, ' ', 3); numeros[2] = numero.toInt(); for(indice2 = 0; indice2 < 3; indice2++) { if(calibra) { if(numeros[indice2] > max_min[indice2][0]) max_min[indice2][0] = numeros[indice2]; if(numeros[indice2] < max_min[indice2][1]) max_min[indice2][1] = numeros[indice2]; } medida[indice2] = int((medida[indice2] + numeros[indice2]) / 2); } indice++; } } Serial.print("\r"); } // Reduce el campo de visión de la cmucam a una zona determinaa void configura_ventana() { int indice; lcd.print("Enciende camara"); delay(5000); for(indice = 0; indice < 3; indice++) { Serial.print("\r"); Serial.readStringUntil(':'); delay(1500); } Serial.print("VW 20 0 60 72\r"); String cadena = Serial.readStringUntil(':'); lcd.clear(); if(cadena.substring(0,3) == "ACK") { lcd.print("Camara OK"); delay(1000); } else { lcd.print("Fallo comando VW"); for(;;); } } // Inicia el proceso de calibración de la cámara y de los botones. void calibra() { int indice; int indice2; int actual; int max; int min; String cadena; for(indice = 0; indice < 7; indice++) { cadena = "Mete un "; cadena.concat(nombres[indice]); lcd.clear(); lcd.print(cadena); delay(10000); gira_plato(53, LOW); detecta_color(true); for(indice2 = 0; indice2 < 3; indice2++) { colores[indice][indice2][0] = max_min[indice2][0] + 20; colores[indice][indice2][1] = max_min[indice2][1] - 20; } gira_plato(26, LOW); delay(500); gira_plato(79, HIGH); if(indice < 6) { cadena = "Pulsa "; cadena.concat(nombres[indice]); lcd.clear(); lcd.print(cadena); max = botones[indice][0]; min = botones[indice][1]; do { actual = analogRead(0); } while(actual < 250); delay(500); for(indice2 = 0; indice2 < 50; indice2++) { actual = analogRead(0); if (actual > max) max = actual; if (actual < min) min = actual; } botones[indice][0] = max; botones[indice][1] = min; } } } // Inicia el proceso de recoger un caramelo, medir qué color tiene y dejarlo en una bandeja u otra dependiendo de si es el elegido bool reconocimiento(int color) { int indice; String cadena; desatasca_embudo(); gira_plato(53, LOW); detecta_color(false); for(indice = 0; indice < 7; indice ++) { if(medida[0] >= colores[indice][0][1] && medida[0] <= colores[indice][0][0]) { if(medida[1] >= colores[indice][1][1] && medida[1] <= colores[indice][1][0]) { if(medida[2] >= colores[indice][2][1] && medida[2] <= colores[indice][2][0]) break; } } } lcd.print(" "); lcd.setCursor(0, 1); cadena = "Es:"; cadena.concat(nombres[indice]); lcd.print(cadena); if(indice == color) { gira_plato(53, HIGH); gira_plato(30, HIGH); delay(500); gira_plato(30, LOW); return true; } else { gira_plato(26, LOW); delay(500); gira_plato(79, HIGH); return false; } } void setup() { pinMode(7, OUTPUT); pinMode(8, OUTPUT); lcd.begin(16, 2); Serial.begin(115200); servo1.attach(9); configura_ventana(); calibra(); lcd.clear(); lcd.print("Mete M&M's"); delay(5000); lcd.clear(); lcd.print("Pulsa un color"); } void loop() { int indice; int indice2; int actual; String cadena; if(analogRead(0) > 250) { delay(200); actual = analogRead(0); for(indice = 0; indice < 6; indice++) { if(actual >= botones[indice][1] && actual <= botones[indice][0]) { break; } } if(indice < 6) { cadena = "Elegido:"; cadena.concat(nombres[indice]); lcd.clear(); lcd.print(cadena); lcd.setCursor(0, 1); indice2 = 0; while(!reconocimiento(indice) && indice2 < 10) { cadena = " "; cadena.concat(indice2); cadena.concat(" "); lcd.print(cadena); lcd.setCursor(0, 1); indice2++; } if(indice2 == 10) { cadena = "Lo siento, no he"; lcd.clear(); lcd.print(cadena); lcd.setCursor(0, 1); cadena = "visto su M&M's"; lcd.print(cadena); delay(3000); } else { cadena = "Su M&M's,gracias."; lcd.clear(); lcd.print(cadena); delay(3000); } } lcd.clear(); lcd.print("Pulsa un color"); } } |
A grosso modo, cuando el sistema se enciende se requiere configurar la cmucam y calibrar tanto de los valores RGB máximos y mínimos del color de cada tipo de caramelo (incluido cuando el plato está vacío) como el votaje del botón para seleccionarlo:
Después el sistema ya está preparado a la espera de que el usuario elija el color del caramelo. Si en 10 intentos no se ha encontrado el caramelo deseado, se aborta el proceso:
Hay 4 posiciones que el motor paso a paso debe alcanzar. La primera, la de recolección, sitúa el hueco del plato justo debajo del embudo para recoger un caramelo. La segunda, la de reconocimiento, sitúa el hueco del plato en el objetivo de la cmucam para poder reconocer el color del caramelo que lleva dentro. La tercera, la de intento fallido, sitúa el hueco del plato en el contenedor para que caiga el caramelo que no es el buscado. Finalmente la cuarta, la del dispensación, sitúa el hueco del plato en el contenedor para que caiga el caramelo solicitado. Los pasos que debe realizar el motor paso a paso para alcanzar todas esas posiciones están medidos a pelo; se consigue haciendo varias pruebas aisladas para saber donde situar el plato.
Por desgracia el sistema no es perfecto y tiene dos fallos:
La forma de los caramelos M&M’s es de tipo lenteja. Esto hace que si caen en horizontal sólo caiga uno en el hueco del plato, pero si caen en vertical es posible que caigan dos a la vez. Esto se solucionaría utilizando caramelos esféricos completamente.
El sistema de medición a veces confunde colores parecidos como el naranja y el amarillo. Esto se solucionaría utilizando sólo los colores más definidos como rojo, azul, verde y amarillo. (en el vídeo se aprecia en el segundo 53 y en el 1:10)
Como mejoras se puede hacer que los caramelos que caigan en el recipiente de los no buscados se vuelvan a meter en el embudo.