![]()
Ante todo no quiero que penséis que esto es ilegal, puesto que Microsoft en su soporte técnico ya ofrece la posibilidad de quitar el control parental de la XBOX 360 mediante una combinación de botones en el mando única para cada consola. Por supuesto no me hago responsable de los usos que le vayáis a dar puesto que el contenido sólo es divulgativo.
La XBOX 360 tiene control parental, que significa que los padres pueden bloquear mediante contraseña el acceso a determinados juegos, películas, etc. Esta contraseña es de 4 dígitos numéricos, por lo que hay 10000 posibles combinaciones de números (del 0000 al 9999). Normalmente los números se introducen mediante la pulsación de los botones del mando de la consola, pero existe la posibilidad de enchufar un teclado usb a la consola y pulsar las teclas correspondientes.
Con esta idea se me ocurrió como prueba de concepto crear un sistema que pudiese introducir las 10000 contraseñas una por una hasta que diese con la correcta (fuerza bruta), en vez de hacerlo a mano que sería más engorroso :-). Lo que tenía más a mano para emular un teclado usb es la placa Vinciduino, pero perfectamente se puede hacer con otra placa con un microcontrolador Atmega32U4 como Arduino Leonardo o la Teensy 2.0.
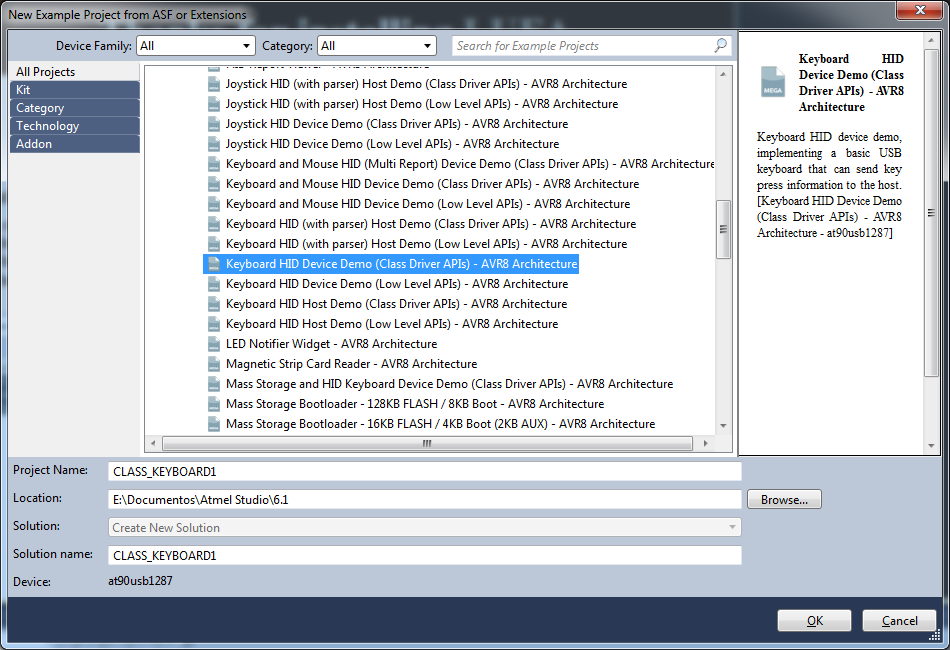
Para programar el microcontrolador usé el Atmel Studio 6.1 junto con la librería LUFA en su extensión para Atmel Studio. La librería LUFA contiene múltiples ejemplos de cómo sacar provecho a los microcontroladores AVR con USB embebido.
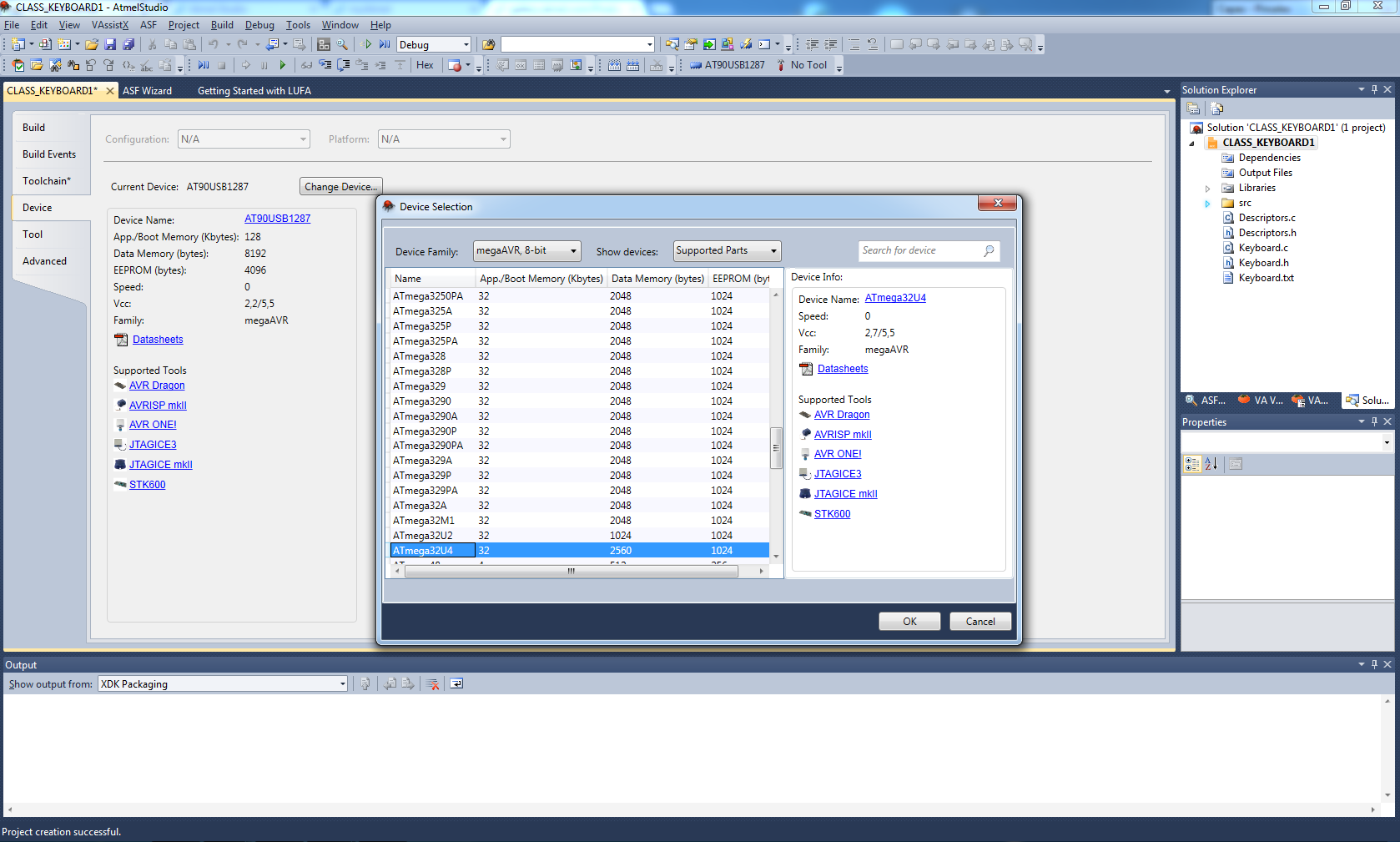
Yo usé el ejemplo Keyboard HID Device Demo (Class Driver APIs):
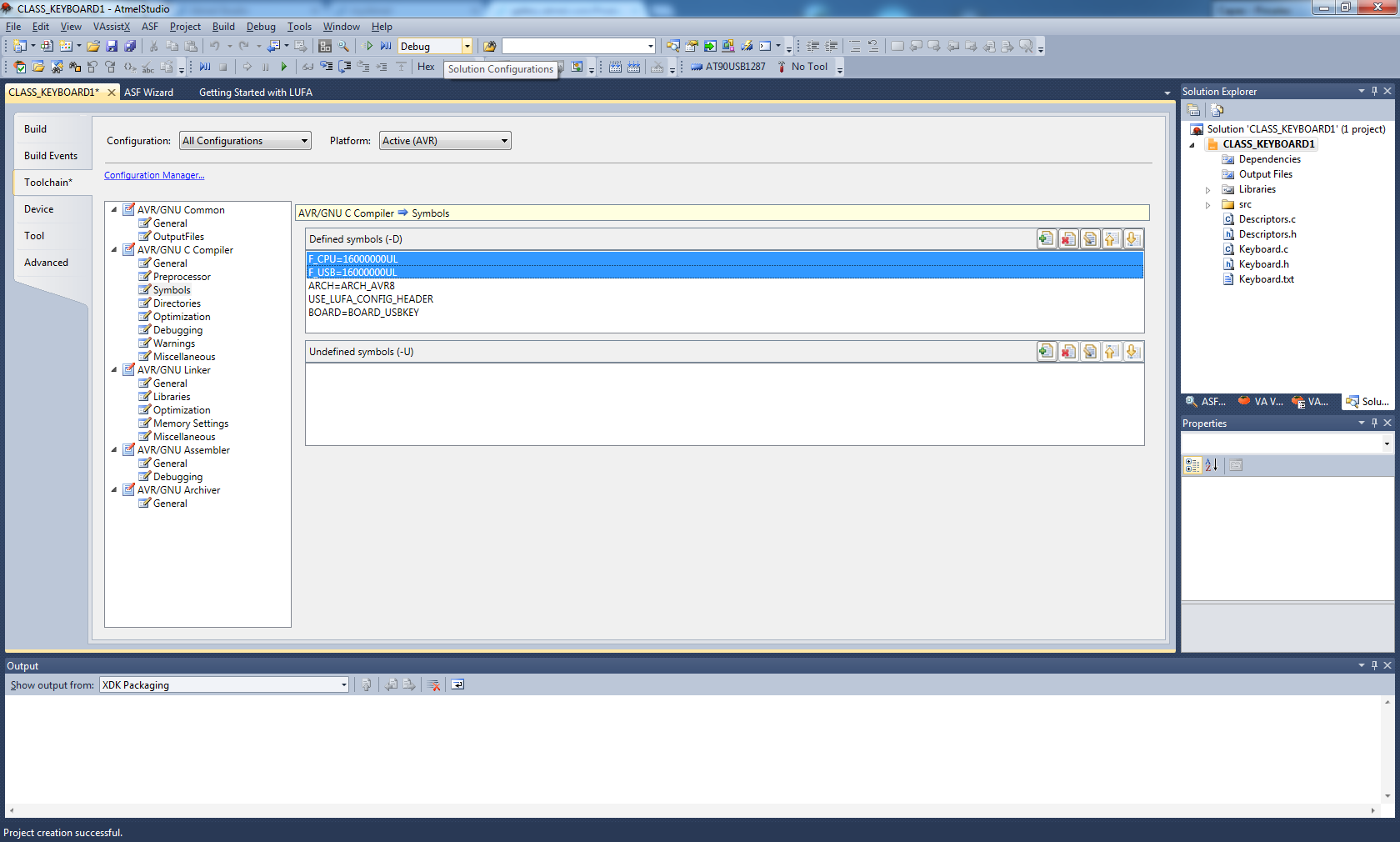
Antes de nada hay que cambiar los valores por defecto que tiene el proyecto para adecuarlos a nuestra placa, en mi caso para Vinciduino:
-El tipo de microcontrolador (Vinciduno tiene un Atmega32U4)
-La velocidad del microcontrolador y del USB en todas las configuraciones (Vinciduno corre a 16 Mhz.)
-Después hay que activar el modo Release para cuando se cree el fichero .hex
-Finalmente sustituir el fichero Keyboard.c por este Keyboard
El programa funciona de la siguiente manera:
- Se espera 10 segundos hasta empezar a enviar la secuencia de números.
- Se emula la pulsación de cada una de las 4 cifras que contiene el número con un intervalo aleatorio entre 0,5 y 1,5 segundos (Esto es así para emular las pulsaciones que haría una persona en un teclado).
- Después se espera 1,5 segundos para que dé tiempo a que salga la pantalla de contraseña incorrecta. A continuación se emula la pulsación de la tecla ENTER.
- Se esperan otros 1,5 segundos para que dé tiempo a que salga la pantalla de introducción de la contraseña de nuevo.
- Se repite el proceso desde el paso 2 hasta que se llegue al número 10000.
Las esperas se realizan mediante el timer0 del microcontrolador. El envío de las pulsaciones del teclado se hacen desde la función de LUFA que genera el informe HID. Cada pulsación enciende el led de la Vinciduino durante 333 ms.
El tiempo máximo entre números es 6 segundos, por lo que en el peor de lo casos se tardaría 6 * 10000 = 60000 segundos (16,7 horas) en encontrar la contraseña correcta.
Como ejemplo pongo un vídeo que he grabado para demostrar el funcionamiento, lo mejor es verlo a 1080 y a pantalla completa. Primero se ve cómo pruebo el sistema en un ordenador donde se ven las pulsaciones en un editor de textos, comprobando así que funciona como si de un teclado se tratase. Después en la XBOX 360 elijo la opción Familia, momento en el que me pide la contraseña, y le enchufo la Vinciduino para que empiece a introducir los diferentes números. La contraseña en esta prueba es 0010 (empezando por el 0000). Cuando se llega a la contraseña correcta no existe una forma de saber si ha sido así, pero como se observa en el vídeo se queda en la opción de menú Activada sin que le afecten las pulsaciones, por lo que se podría dejar corriendo sin estar presente, sabiendo que cuando llegase al número 10000 dejaría de enviar pulsaciones.